3D-Printed Pneumatic Modules Replace Electric Controls in Soft Robots
 © Lucia Brunhold
© Lucia Brunhold
Research team at the University of Freiburg develops 3D-printed pneumatic logic modules that control the movements of soft robots using only air pressure.
In the future, soft robots will be able to perform tasks that cannot be done by conventional robots. These soft robots could be used in terrain that is difficult to access and in environments where they are exposed to chemicals or radiation that would harm electronically controlled robots made of metal. This requires such soft robots to be controllable without any electronics, which is still a challenge in development. A research team at the University of Freiburg has now developed 3D-printed pneumatic logic modules that control the movements of soft robots using air pressure alone. These modules enable logical switching of the air flow and can thus imitate electrical control. The modules make it possible for the first time to produce flexible and electronics-free soft robots entirely in a 3D printer using conventional filament printing material. The team led by Dr. Stefan Conrad, Dr. Falk Tauber, Joscha Teichmann and Prof. Dr. Thomas Speck from the Cluster of Excellence “Living, Adaptive and Energy-autonomous Materials Systems (livMatS)” has published its results in the renowned journal Science Robotics.
“Our design makes it possible for anyone with 3D printing experience to produce such logic modules and use them to control a soft robot without the need for high-end printing equipment,” says Conrad. “This marks a significant step towards completely electronics-free pneumatic control circuits that can replace increasingly complex electrical components in soft robots in the future.”
Modules can perform Boolean operations and direct airflow into movement elements in a targeted manner
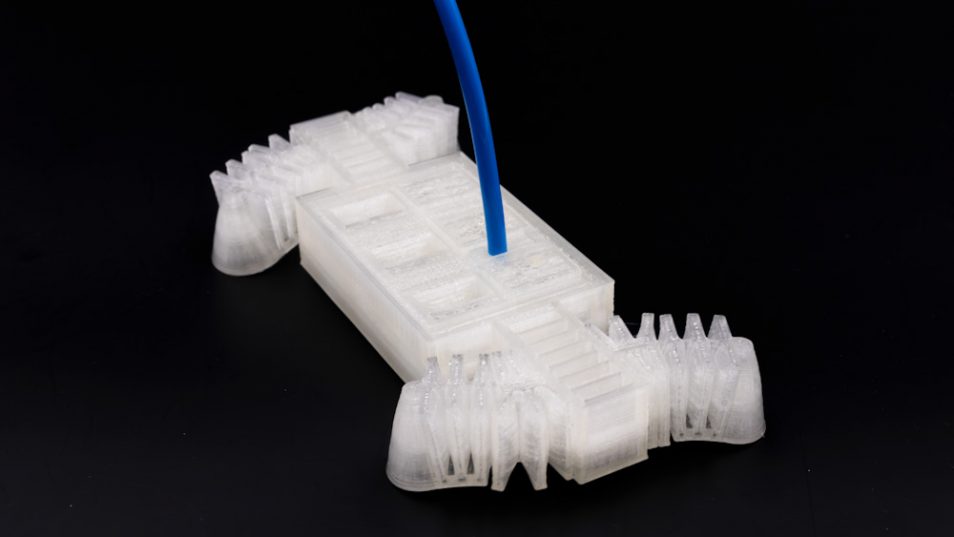
The modules consist of two pressurised chambers. A 3D-printed channel runs between these chambers. By compressing the channel, the expanding chambers can stop the air flow in it and regulate it like a valve. By opening and closing the valve in a targeted manner, the modules can perform the Boolean logic functions “AND”, “OR” and “NOT” in a similar way to electrical circuits and direct the air flow into the movement elements of the soft robot. Which function the individual module performs is determined by the chambers into which air pressure is applied. Depending on the material selected, the modules can be operated with a pressure of between 80 and more than 750 kilopascals. Compared to other pneumatic systems, they have a fast response time of around 100 milliseconds.
Wide range of applications
“The potential applications of these modules are enormous. We have developed a flexible 3D-printed robotic walker that is controlled by an integrated circuit using air pressure. The flexibility of the logic modules is demonstrated by the fact that this walker can even withstand the load of a car driving over it,” says Tauber. “As an example of more complex control systems, we have also developed an electronics-free drinks dispenser.”
About the Cluster of Excellence livMatS
The vision of the Cluster of Excellence Living, Adaptive, and Energy-Autonomous Materials Systems (livMatS) is to combine the best of both worlds – nature and technology. livMatS develops lifelike materials systems inspired by nature. These systems adapt autonomously to their environment, harvest clean energy from their surroundings, and are insensitive to or able to recover from damage.
- Original publication: Conrad, J. Teichmann, et al., Sci. Robot. 9, eadh4060 (2024). DOI: 10.1126/scirobotics.adh4060
- Stefan Conrad did his doctorate in the Plant Biomechanics Group and at the livMatS Cluster of Excellence at the University of Freiburg.
- Falk Tauber is a project leader at the livMatS Cluster of Excellence and co-coordinator of the research area “Demonstrators”. He is an independent group leader in the Plant Biomechanics Group at the University of Freiburg.
- Joscha Teichmannis doing his doctorate in the Plant Biomechanics Group and the livMatS Cluster of Excellence at the University of Freiburg.
- Thomas Speck has been Full Professor of Botany: Functional Morphology and Biomimetics and Director of the Botanic Garden at the University of Freiburg since 2001. He heads the Plant Biomechanics Group there and is a member of the spokesperson team of the livMatS Cluster of Excellence at the University of Freiburg.
- The study was funded by the German Research Foundation (DFG) (livMatS – EXC 2193).
Contact:
Office of University and Science Communications
University of Freiburg
Tel.: 0761/203-4302
e-mail: kommunikation@zv.uni-freiburg.de
Read the article on the University of Freiburg website.